Simulating the UBR-1¶
Unbounded Robotics has created a simulation environment for the UBR-1 built on the open source simulator Gazebo. This simulator allows you to test certain pieces of code even when you do not have access to a robot, or before running certain code on the actual robot.
It should be noted that this is a simulation, and is certainly not a perfect model of the world or the robot. Results between real world and simulation may vary wildly at times. Be sure to also note the limitations and differences of the simulated UBR-1 which are listed at the bottom of this page.
Starting the Simulator¶
To start the simulator, you will run one of several roslaunch files. Each roslaunch file brings up a different environment. The simplest environment is started by running:
>$ roslaunch ubr1_gazebo simulation.launch
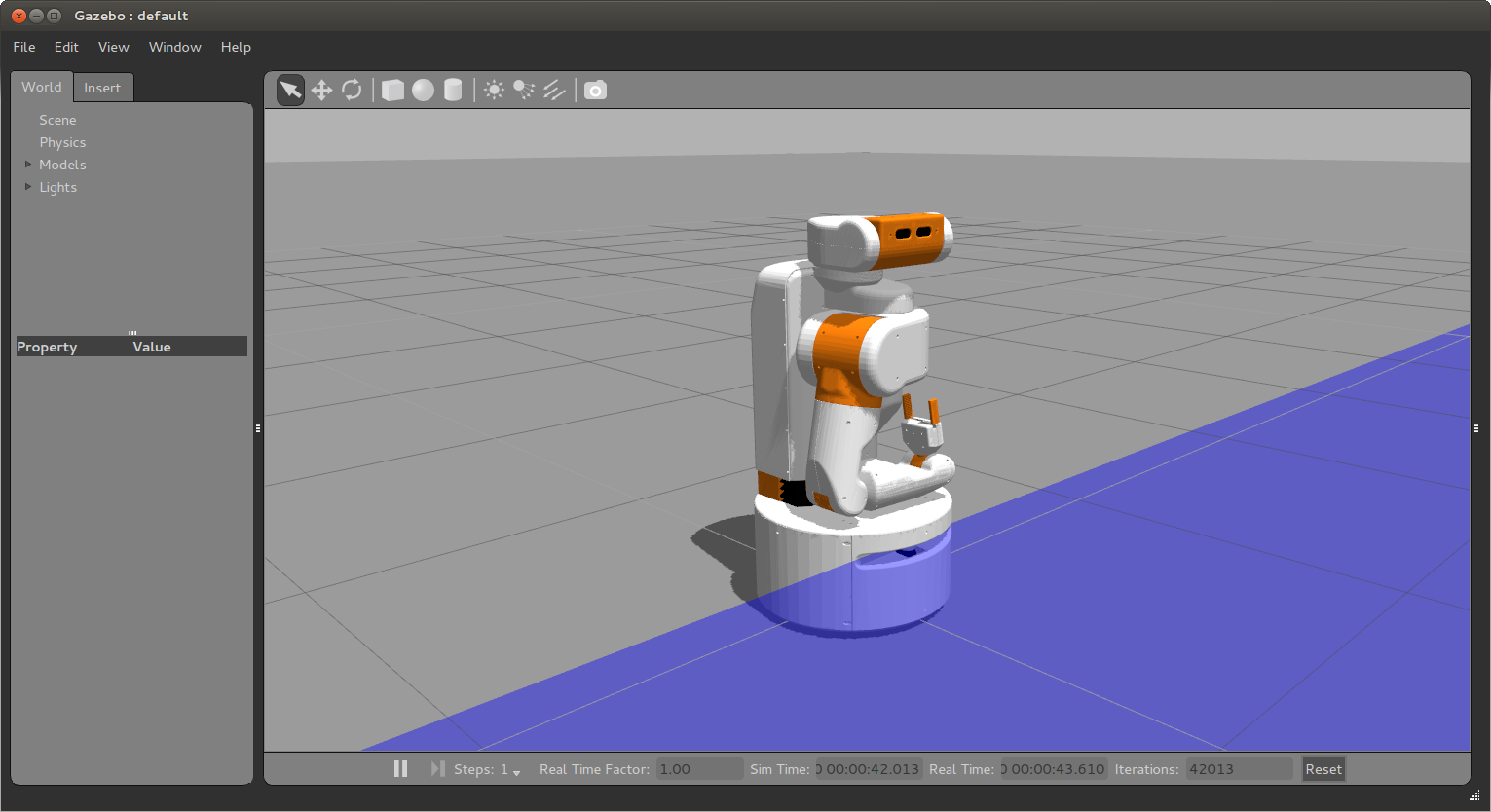
This environment includes nothing except a robot and the floor. In every environment, the robot will be initialized with the arm tucked and the head pointing forward:
There are several other environments:
- simulation_home.launch brings up a small “home” with an environment designed to be similar to the RoboCup@Home competition environment.
- simulation_grasping.launch brings up a table with some cubes on it for trying out manipulation.
Connecting with RVIZ¶
Once your simulator is up and running, you probably want to connect with RVIZ to see what is going on in more detail. In a new terminal, run the following:
>$ rosrun rviz rviz
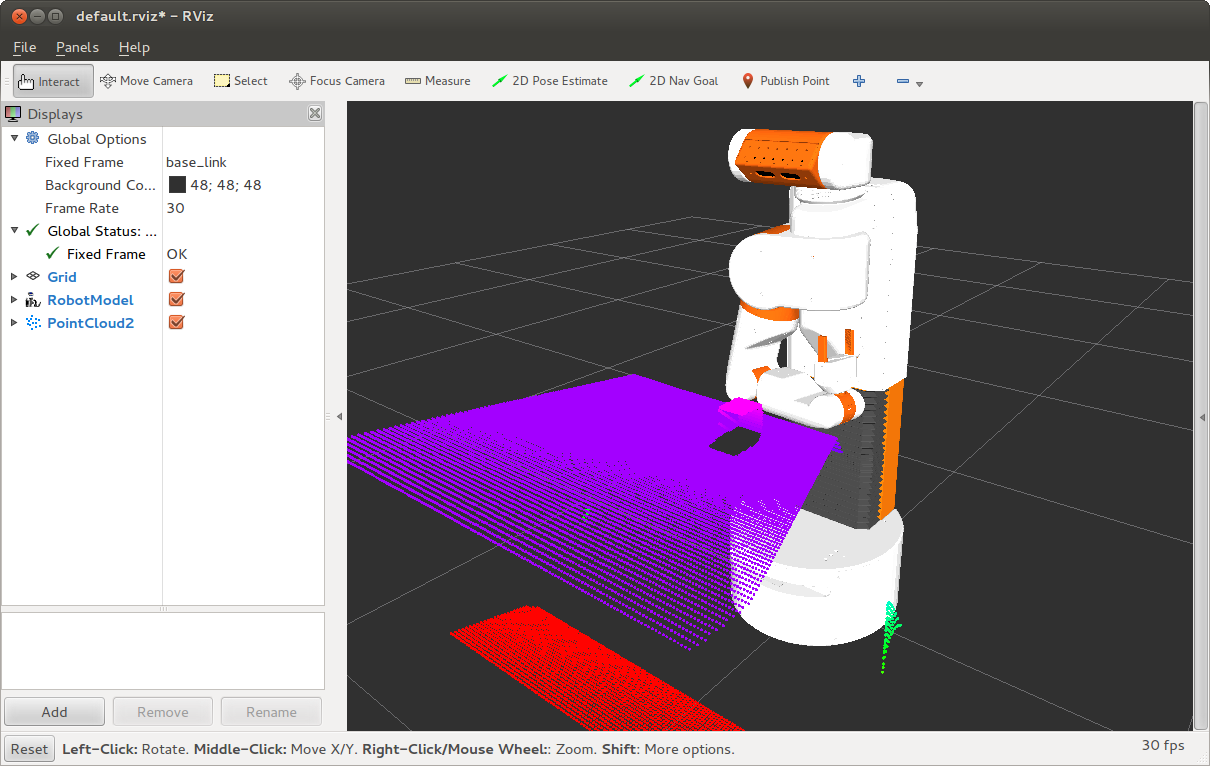
To setup RVIZ to show the relevant topics, there are a set of config files that can be loaded when running various apps. Under “File | Open Config” you can navigate to the ubr1_gazebo package, and in the config folder you will find a default.rviz file which will setup RVIZ to look like this when running the grasping world:
Teleoperating the Simulated UBR-1¶
The ubr_teleop package includes a number of scripts for commanding the robot to move its joints in certain ways. The first thing you probably want to do is drive the robot around. The keyboard_telop node allows you to do this:
>$ rosrun ubr_teleop keyboard_teleop
Reading from keyboard
-------------------------
Use 'WASD' to translate
Use arrow keys to move head
Any other key to stop
Now, if you press the ‘w’ key, the robot will drive forward. Hitting any key other than WASD or arrows will stop the robot. ‘a’ turns left, ‘s’ right.
There is a script for controlling the torso, called set_torso_pose.py that takes a single parameter, the height of the torso in meters. The torso has a range of 0 to about 0.35m:
>$ rosrun ubr_teleop set_torso_pose.py 0.135
[INFO] [WallTime: 1402534422.712588] [0.000000] Waiting for torso_controller...
[INFO] [WallTime: 1402534422.925660] [1050.681000] ...connected.
[INFO] [WallTime: 1402534422.926222] [1050.681000] Setting torso pose to 0.350000
[INFO] [WallTime: 1402534430.001018] [1057.705000] ...done
Similarly, the gripper can be controlled between open (0.09m) and closed (0.0m) using either a distance or the word “open” or “closed”:
>$ rosrun ubr_teleop set_gripper_pose.py open
[INFO] [WallTime: 1402534358.090159] [0.000000] Waiting for gripper_controller...
[INFO] [WallTime: 1402534358.337175] [986.410000] ...connected
[INFO] [WallTime: 1402534358.337896] [986.410000] Setting gripper pose to 0.090000
[INFO] [WallTime: 1402534358.339674] [986.414000] Results:
position: 0.0899971663187
effort: 0.00567451527058
stalled: False
reached_goal: True
A final script, called set_head_pose.py will allow you to set the head pan and tilt:
>$ rosrun ubr_teleop set_head_pose.py 0 0.1
Will set the head pan to 0 (forward), and tilt to 0.1 (slightly upward).
One thing to note is how the topics of the mobile base teleop are connected. The keyboard_teleop node publishes to a topic called teleop/cmd_vel. However, the mobile base gets it’s commands from base_controller/command, and most applications will (such as navigation) will publish their commands to cmd_vel. The key is a topic multiplexor that forwards cmd_vel to base_controller/command by default, but whenever the you start pressing keys in keyboard_teleop the multiplexor will override cmd_vel with the values sent to teleop/cmd_vel.
Differences and Limitations¶
The simulated robot is not exactly the same as the real robot. Notable differences include:
- The simulator does not simulate the IMUs at this time. Additionally, because there is no IMU data, the odom_combined tf frame is created only by using odometry. On the real robot, odometry is fused with the IMU using Graft.
- The head_camera/depth/* topics do not exist due to a current limitation with the gazebo_ros interface.
- The robot may eventually wander away when sitting still due to accumulated error in the simulation. Rest assured, the real robot will not wander off unless you command it to do so.